Cet appareil n'a pas de nom, mais il sert à controller un appareil photo et un
flash pour prendre des photos d'objets qui tombent. Un rayon laser (récupéré
d'un pointeur laser rouge bas de gamme) dont la présence est détectée par un
phototrasistor sensible à la lumière visible est interrompu par l'objet qui
tombe, et après un temps déterminé, le flash est déclenché.
Le code est disponible.

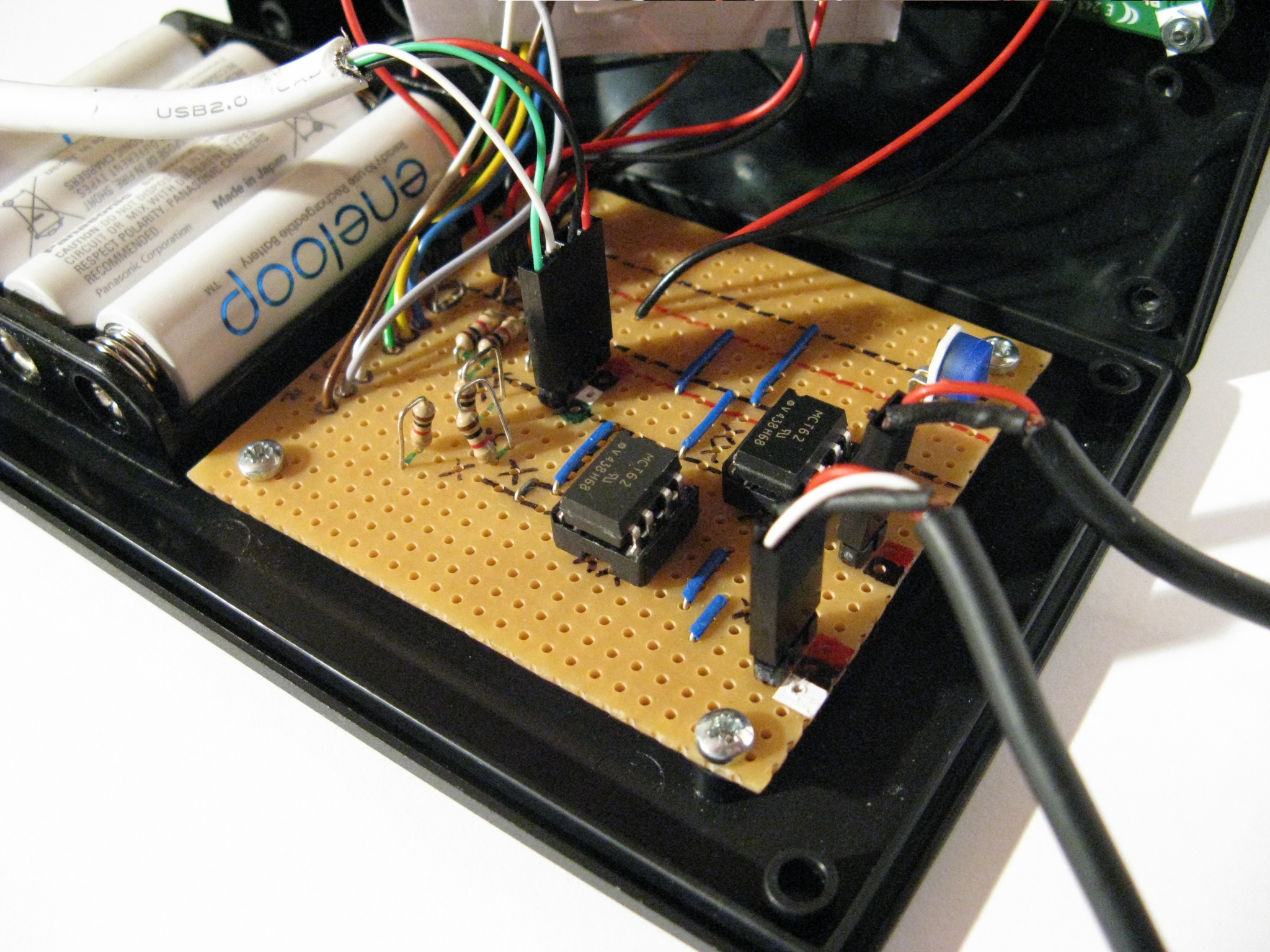
L'appareil utilise un RBBB (compatible Arduino, mais dans un format plus
compact) pour contrôler un écran LCD alphanumérique, l'appareil photo via sa
télécommande par câble, et le flash via son sabot. Il permet aussi de règler le
délai entre la détection de la chute de l'objet et la prise de la photo. On
peut en outre règler la longueur de l'impulsion du flash (ce qui n'est pas
très utile apparemment, étant donné que cette durée n'a pas l'air d'avoir
d'influence sur la durée du flash, mais cette durée détermine aussi le délai
entre le déclenchement du flash et la fermeture de l'obturateur de l'appareil
photo). En outre, on peut choisir à quel moment l'obturateur sera ouvert
(avant de faire tomber l'objet à photographier, au moment où celui-ci coupe le
faisceau laser, ou le mode manuel où l'utilisateur a la responsabilité
d'ouvrir l'obturateur), et l'envoi ou non d'une impulsion pour effectuer la
mise au point (la télécommande filaire est conçue de sorte à ce que le signal
de mise au point soit toujours envoyé avant le signal d'ouverture de
l'obturateur, il se peut que l'appareil ne fonctionne pas correctement si le
second n'est pas précédé du premier).
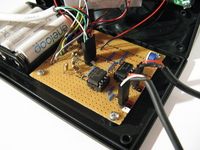
Le RBBB est alimenté par 4 batteries rechargeables NiMH, qui fournissent
ensemble une tension maximale de 5,4 V, juste en dessous de la limite maximum
du microcontrolleur (5,5 V). Ceci permet de se passer d'un régulteur de
tension, à condition de ne pas utiliser de piles alcalines (qui produiraient
une tension trop élevée, 6,6 V au maximum).
Une des difficultés a été que le laser tend à chauffer, ce qui diminue environ
de moitié sa luminosité au bout de 30 s. À ce moment, le laser n'est alors
plus assez puissant pour être détecté par le phototransitor. La seule
solution est de ne pas laisser au laser le temps de chauffer.
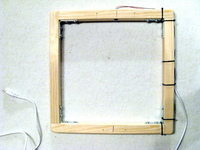
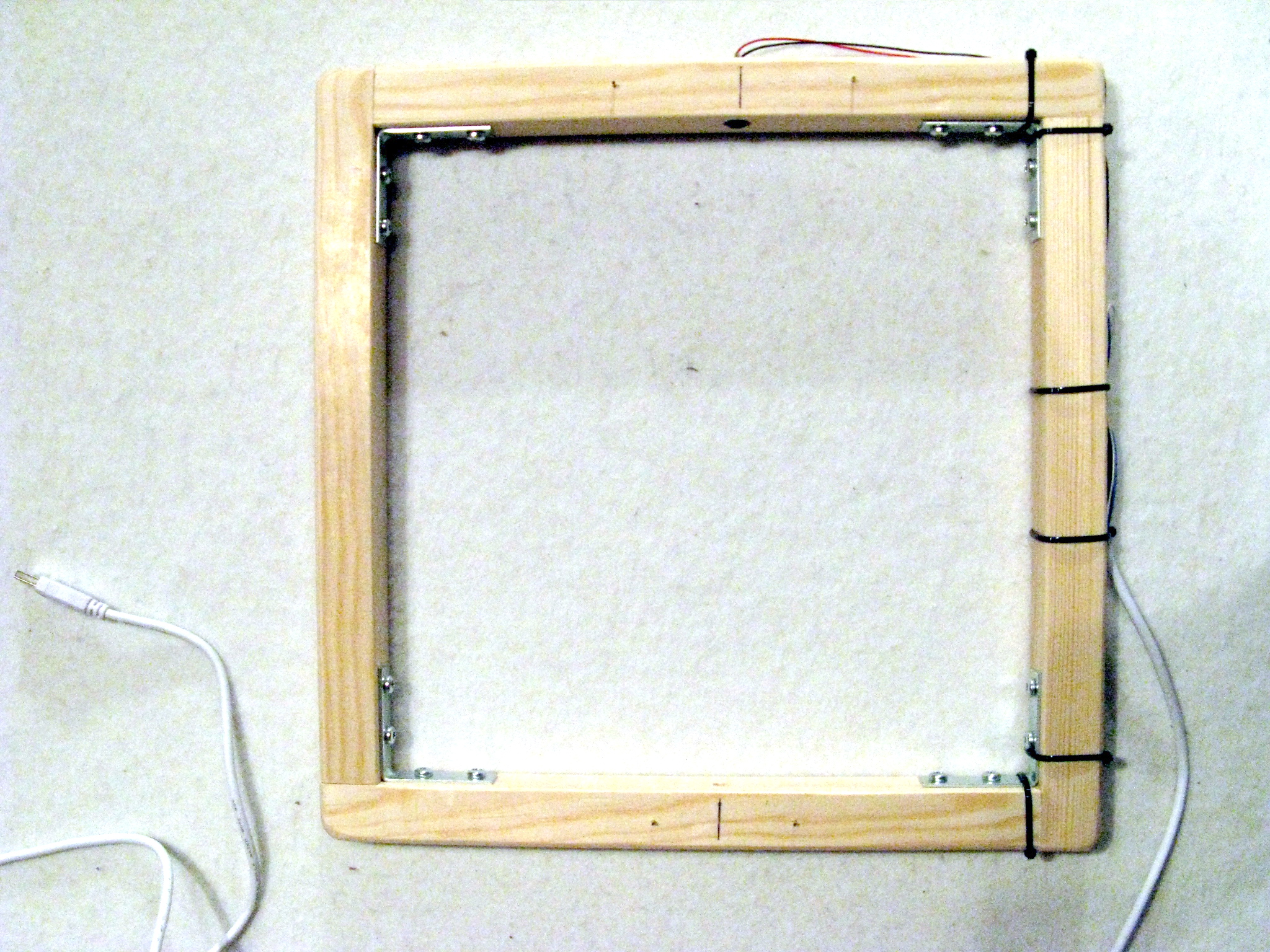
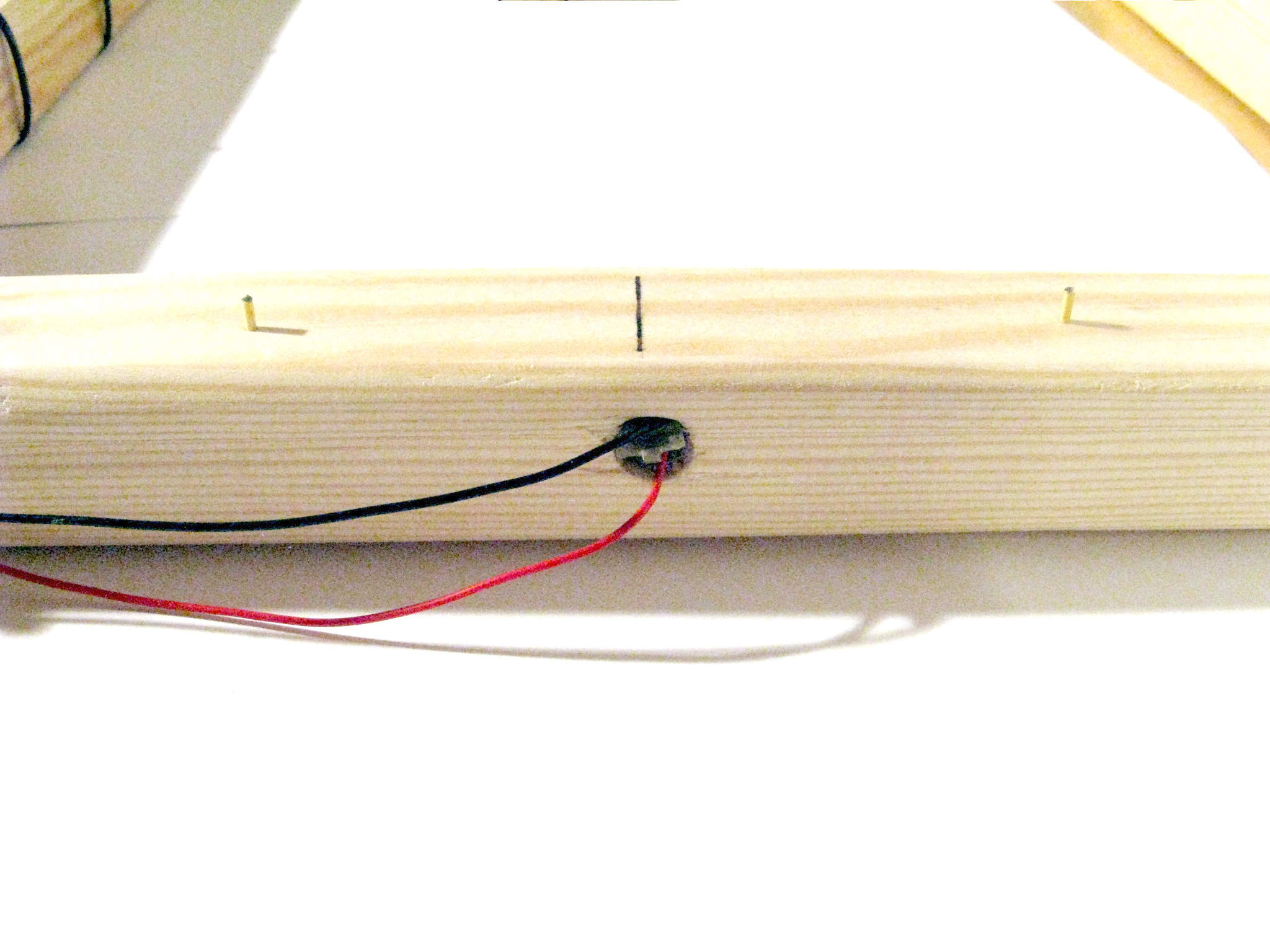
Une autre difficulté a été la construction du cadre en bois qui porte le laser
et le phototransistor : il n'est pas parfaitement plan (je voulais le rendre
démontable et j'ai donc utilisé des angles en acier à visser, mais comme je
n'ai pas réussi à visser les vis bien verticalement, elles ont déplacé
légèrement les angles et tordu les quatre morceaux de bois). De plus, il n'est
pas facile de percer un trou bien droit (pour recevoir le laser) et aligné
avec un trou similaire (pour recevoir le phototransitor) sur le coté opposé du
cadre.
Pour aligner le laser sur le phototransistor, il faut donc tourner un
peu le premier dans son logement jusqu'à ce que le point rouge atteigne le
centre du phototransistor. L'appareil dispose d'ailleurs d'un mode de
fonctionnement où le laser est allumé en permanence et où l'utilisateur peut
voir si le phototransistor est correctement éclairé.
La dernière difficulté a été de me rendre compte que le temps de chute de
l'objet (entre le moment où le laser est interrompu et le moment où la photo
doit être prise) dépend de la vitesse de l'objet au moment où il passe dans le
faisceau laser, donc de la hauteur (au dessus du faisceau) d'où l'objet a été
laché. Pour obtenir des expériences répétables, il faut donc faire tomber
l'objet à partir du support sur lequel il repose, et il faut donc que ce
support soit à une distance connue du faisceau. Le support est donc un
morceau de carton ondulé percé d'un trou assez grand pour laisser passer
l'objet (mais pas trop grand pour que l'objet ne puisse pas tomber à coté du
faiscea) posé sur le cadre en bois. La distance d entre le haut du carton et
le faisceau, la hauteur de chute h du haut du carton jusq'à l'endroit où la
photo est prise et le temps de chute t sont liés par l'équation suivante :
t = √(2/g) × (√h - √d) où g est l'accélération de la
pesanteur.